Basin is a new numerical optimization library that pairs a small generic core, a set of problem traits that you implement, a pluggable termination layer, and a driver loop called the Executor. On top of that sits a growing collection of solvers spanning first-order, derivative-free, nonlinear least-squares, and evolutionary methods.
I built Basin entirely because of my project Eunoia—a Rust library1 that generates Euler diagrams from set combination specifications. Laying out an Euler diagram is a nonlinear optimization problem, often with many local minima, and it demands both accuracy, since these diagrams often end up in scientific publications, and efficiency.
1 With bindings in R, Python, and JavaScript.
When I first built the R package eulerr (larsson2018?), I relied on R’s built-in nlm(), which uses a nonlinear trust-region method, with the GenSA package as an optional fallback when accuracy mattered. Eunoia was meant to replace eulerr’s old C++ backend, so I needed a new solution for the optimization part. And because I also wanted to drop the old Shiny-based web app for eulerr in favor of a static WebAssembly (WASM) compatible one, the library had to support WASM out of the box.
These requirements quickly led me to argmin, a Rust optimization library with exactly this WASM compatibility built in, a large set of solvers, and good performance to boot. I wired it up and relied on it for a long time, and it worked quite well.
Eventually, though, a few things started to grate at me:
argmin lacks broad support for constraints. For Eunoia this was a problem, because the optimization problem is naturally constrained—there is a limit to how far apart two circles can be if you still want them to overlap.
Convergence criteria are handled on a per-solver basis, which made it hard to expose an ergonomic criterion in eulerr, where I wanted users to have only one or two knobs to tune across a range of optimizers.
I needed specific solvers that argmin didn’t support, including Levenberg–Marquardt (for the default loss in Eunoia, squared residuals) and memetic solvers: a global or semi-global solver such as CMA-ES or Differential Evolution paired with a local search by a smooth solver such as Levenberg–Marquardt or L-BFGS-B.
Together these meant my dependencies kept growing—a separate crate just for Levenberg–Marquardt—with no good option at all for the memetic variants. So in the end, I started building my own Rust library: Basin.
Installation
Add the crate with Cargo:
cargo add basinBy default Basin uses plain Vec<f64>, which carries no extra dependencies. If you’d rather work with a proper linear-algebra library, you can opt into one with a feature flag:
cargo add basin --features nalgebra # or: ndarray, faerUsage
You describe your problem by implementing the relevant traits, then hand the problem, a solver, and an initial state to the Executor. Here is the obligatory Rosenbrock function, minimized with gradient descent.
use basin::{BasicState, CostFunction, Executor, Gradient, GradientDescent, GradientTolerance};
use std::convert::Infallible;
struct Rosenbrock;
impl CostFunction for Rosenbrock {
type Param = Vec<f64>;
type Output = f64;
type Error = Infallible;
fn cost(&self, x: &Vec<f64>) -> Result<f64, Self::Error> {
Ok((1.0 - x[0]).powi(2) + 100.0 * (x[1] - x[0].powi(2)).powi(2))
}
}
impl Gradient for Rosenbrock {
type Gradient = Vec<f64>;
fn gradient(&self, x: &Vec<f64>) -> Result<Vec<f64>, Self::Error> {
Ok(vec![
-2.0 * (1.0 - x[0]) - 400.0 * x[0] * (x[1] - x[0].powi(2)),
200.0 * (x[1] - x[0].powi(2)),
])
}
}
fn main() {
let result = Executor::new(
Rosenbrock,
GradientDescent::new(1e-3),
BasicState::new(vec![-1.2, 1.0]),
)
.max_iter(50_000)
.terminate_on(GradientTolerance(1e-6))
.run()
.unwrap();
println!(
"x = {:?}, f = {}, stopped: {:?}",
result.param(),
result.cost(),
result.reason
);
}The pattern generalizes. A solver that needs a gradient asks for the Gradient trait, a least-squares solver asks for residuals and a Jacobian, and so on. The compiler tells you exactly what each solver expects.
Constraints work the same way. To minimize subject to linear inequalities A x \le b, you implement one more trait, LinearInequalityConstraints, and hand the problem to a solver that knows what to do with it. Here is a quadratic pulled toward (2, 2) but held under the line x + y \le 2, solved with the log-barrier method wrapped around gradient descent.
use basin::{
Backtracking, BarrierMethod, BasicState, CostFunction, DenseMatrix, Executor, Gradient,
GradientDescent, LinearInequalityConstraints,
};
use std::convert::Infallible;
struct Constrained {
a: DenseMatrix,
b: Vec<f64>,
}
impl CostFunction for Constrained {
type Param = Vec<f64>;
type Output = f64;
type Error = Infallible;
fn cost(&self, x: &Vec<f64>) -> Result<f64, Self::Error> {
Ok((x[0] - 2.0).powi(2) + (x[1] - 2.0).powi(2))
}
}
impl Gradient for Constrained {
type Gradient = Vec<f64>;
fn gradient(&self, x: &Vec<f64>) -> Result<Vec<f64>, Self::Error> {
Ok(vec![2.0 * (x[0] - 2.0), 2.0 * (x[1] - 2.0)])
}
}
impl LinearInequalityConstraints for Constrained {
type Matrix = DenseMatrix;
fn a(&self) -> &DenseMatrix {
&self.a
}
fn b(&self) -> &Vec<f64> {
&self.b
}
}
fn main() {
let problem = Constrained {
a: DenseMatrix::from_row_slice(1, 2, &[1.0, 1.0]),
b: vec![2.0],
};
let result = Executor::new(
problem,
BarrierMethod::new(GradientDescent::with_line_search(Backtracking::new())),
BasicState::new(vec![0.0, 0.0]), // strictly feasible: 0 + 0 < 2
)
.max_iter(50)
.run()
.unwrap();
println!("x = {:?}, stopped: {:?}", result.param(), result.reason);
}The unconstrained minimum sits at (2, 2), but the constraint pushes the solution back onto the boundary at (1, 1), which is exactly where the barrier method lands. The constraint is part of the problem’s type, so handing it to a solver that can’t honor constraints is a compile error rather than a wrong answer. This is the piece argmin was missing for Eunoia, where a pair of circles can only drift so far apart before they stop overlapping.
WASM
Because Basin compiles to WebAssembly with no native dependencies, the same solvers run unchanged in the browser. The playground at basin.rs/playground is built directly on this: you choose a problem and a solver, adjust the parameters, and watch the optimizer iterate in real time, with all the math running client-side and no server involved.
Solvers
Basin ships with a fairly broad set of methods already:
- First-order and quasi-Newton
- Gradient descent, BFGS, L-BFGS, and L-BFGS-B
- Derivative-free
- Nelder–Mead and Brent’s method for one dimension
- Nonlinear least squares
- Gauss–Newton, Levenberg–Marquardt, and trust-region reflective
- Global
- Random search, CMA-ES, a genetic algorithm, and memetic combinations
- Stochastic
- Stochastic gradient descent
- Constrained
- Box bounds, log-barrier, and augmented Lagrangian wrappers
I’ve tried to follow the published descriptions of these algorithms closely rather than reaching for ad-hoc variants. Levenberg–Marquardt damping follows Madsen et al. (2004), and CMA-ES follows Hansen (2016).
Key Features of Basin
There are three design choices that I think highlight what Basin is about, and they were the reasons I started the project in the first place.
Pluggable Backends
The core is generic over the vector and matrix types it operates on. You can use plain Vec<f64> with no dependencies at all, or opt into nalgebra, ndarray, or faer when you want a real linear-algebra library. Each one is a single feature flag, so you never pay for a dependency you don’t use.
This idea was inspired by argmin, which uses the same pattern. The only difference is that argmin provides version-gated features for each of the backends (e.g. nalgebra_v32). That pattern is arguably more powerful, but I did not want to take on the maintenance burden of supporting a growing matrix of Basin–backend combinations. Basin will instead support a set of backends at fixed versions for each major release, and update them together in sync with a major release.
First-Class Constraints
Box bounds are part of the type system rather than an afterthought. If you hand a constrained problem to a solver that can’t handle constraints, you get a compile-time error instead of a silent or surprising result at runtime. The same idea applies to termination criteria, which are checked at compile time against what each solver actually supports.
WebAssembly First
Basin is designed to compile to wasm32-unknown-unknown out of the box. It needs no BLAS, no LAPACK, and no threading library. This matters to me because, much like with Qualpal, I like being able to ship solvers into static web apps without standing up a server.
Benchmarks
How does all of this translate into actual numbers? Basin’s homepage includes a set of head-to-head benchmarks against other Rust optimizers (argmin, gomez, and the venerable NLopt) on the classic Rosenbrock function. Each run is capped at 200 iterations on an AMD Ryzen 9 7900 using the dependency-free Vec<f64> backend. The figure below plots suboptimality f(x) - f^* against wall-clock time on log–log axes, with one line per library.
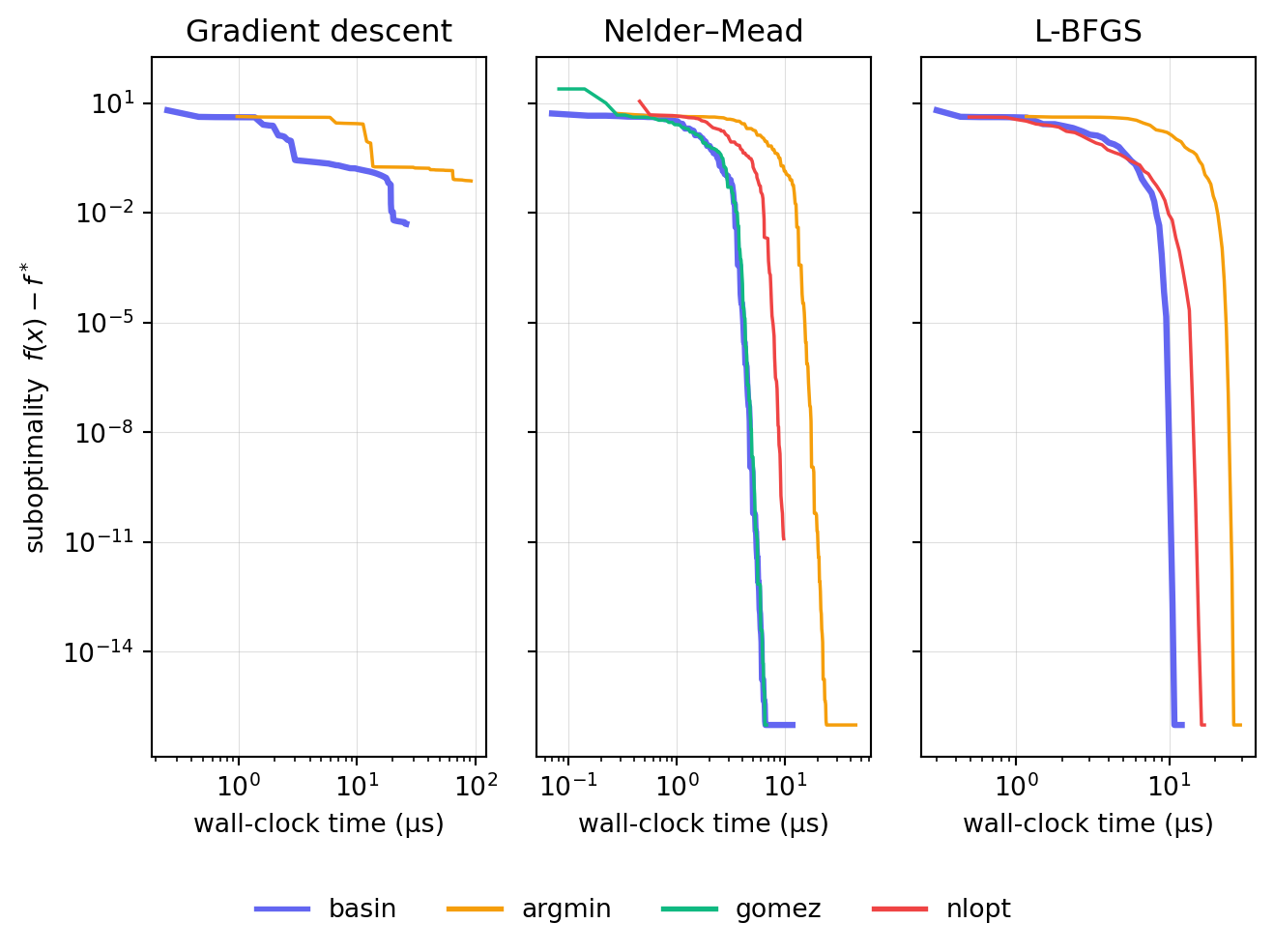
Vec<f64> backend, AMD Ryzen 9 7900). Lower and further left is better; Basin is drawn with a heavier line.
Across all three solvers, Basin reaches a suboptimality of 10^{-6} at least as quickly as every competitor, roughly 4 µs on Nelder–Mead and 10 µs on L-BFGS, against 16 µs and 24 µs for argmin. On gradient descent it both converges deeper and finishes the full run in about a third of the time argmin takes. These are micro-benchmarks on a single problem and machine, so take them with the usual grain of salt, but I think they are encouraging! The complete set, including per-backend comparisons, is at basin.rs/benchmarks, which also includes benchmarks that compare the various backends against each other as well as the solvers themselves on a range of problems.
Status and Contributing
Basin is still young but has reached 1.0, so the public API is stable and follows semantic versioning: breaking changes are reserved future major releases. The crate is on crates.io and dual-licensed under MIT and Apache-2.0.
If you give it a try, I’d love to hear how it goes. You can file issues or start a discussion over at the GitHub repository, and the full documentation, including the API reference, is at basin.rs. Contributions of any kind are very welcome.